ITS・自動運転に係る政府全体の戦略である「官民ITS構想・ロードマップ」(IT総合戦略本部決定)では、高度な自動運転を見据えた市場化・サービス化に係るシナリオと目標を設定としています。自家用車、物流サービス、移動サービスに分けて、高度自動運転の実現に向けた2025年までのシナリオを策定しています。
国土交通省では、この政府目標を達成するために、有識者からなる「自動運転に対応した道路空間に関する検討会(座長 東京大学羽藤教授)」を2019年7月に立ち上げて議論を行い、道路インフラが早急に取り組むべき事項について、自動運転に対応した走行空間の確保や自己位置特定のためのインフラからの支援等の提言を取りまとめています。
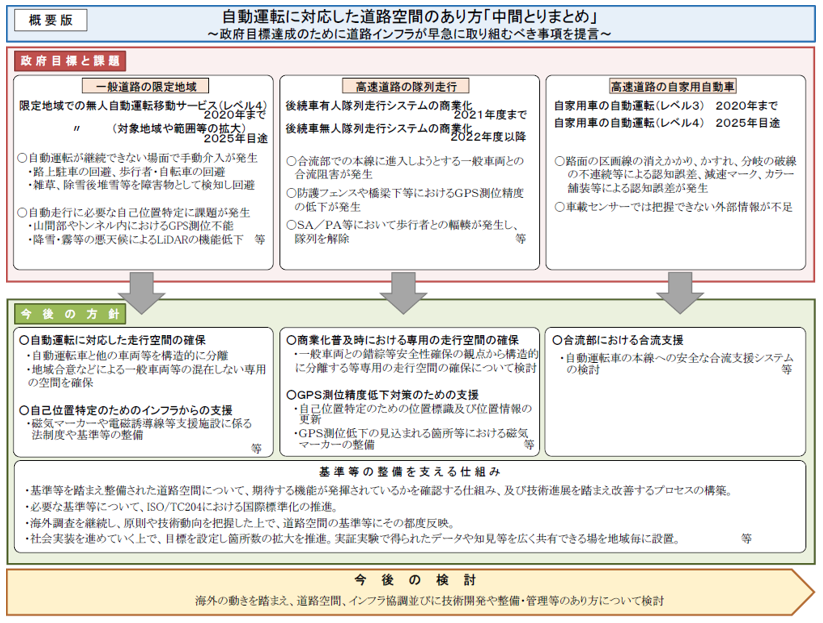 自動運転に対応した道路空間のあり方「中間とりまとめ」概要版
自動運転に対応した道路空間のあり方「中間とりまとめ」概要版
自動運転は、交通事故の削減、渋滞の緩和、高齢者の移動手段の確保等の課題の解決に大きな効果が期待されており、政府全体の目標として、2020年を目途とした高速道路での自動運転の実現や、2020年までの限定地域での無人自動運転移動サービスの実装、2025年目途に全国の各地域におけるサービスの実現が掲げられています。
国土交通省では2016年に「自動運転戦略本部」を設置し、自動運転の実現に向けた環境整備、技術の開発・普及促進、実証実験・社会実装のために必要な施策に取り組んでいます。 高齢化が進む中山間地域等での人流・物流を確保するため、2017年度よりSIP予算を活用して全国18箇所の道の駅等を拠点とした自動運転による移動サービスの実証実験を実施しています。実証実験期間中に得られたデータや自動運転サービス利用者のアンケート、サービス運営時に明らかになった課題等を検証し、自動運転サービスの技術面での評価を行っています。
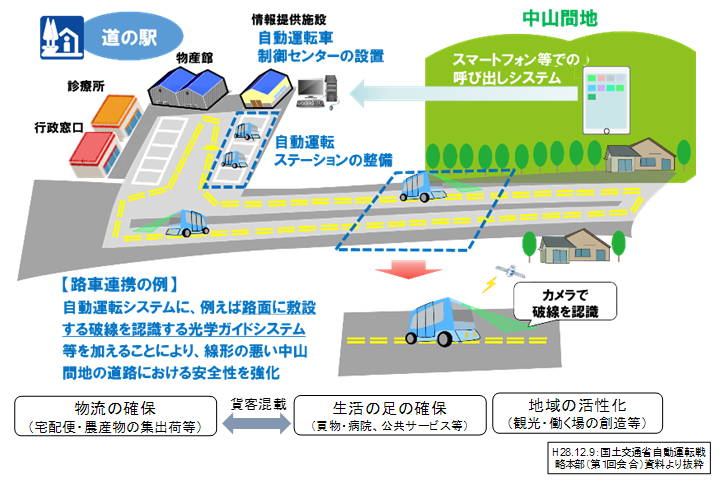 中山間地域における道の駅等を拠点とした自動運転サービス
中山間地域における道の駅等を拠点とした自動運転サービス
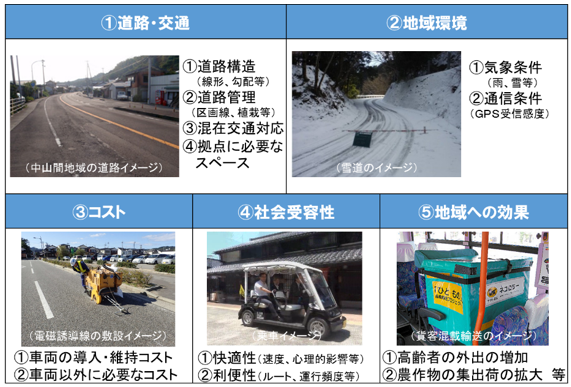 実験での検証内容
実験での検証内容
 道の駅「にしかた」での自動運転サービス
道の駅「にしかた」での自動運転サービス
2018年1月から応募のあった民間企業等の29者とともに、路車協調のITSサービスの技術開発を目的とした「次世代の協調ITSの実用化に向けた技術開発に関する共同研究(以下、共同研究)」を実施しています。
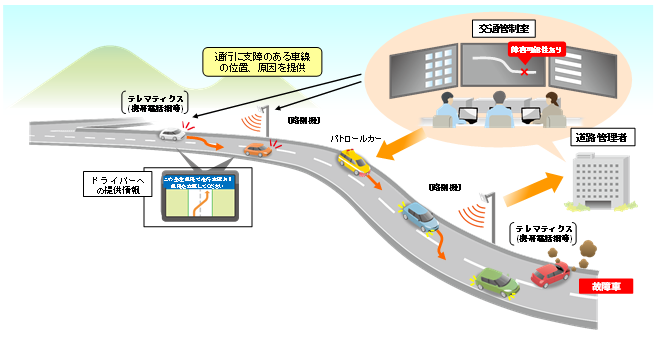
協調ITSとは、車とインフラの通信方式やデータ形式等の整合を図ることにより、車、路側機、センターなどが相互に情報を交換し、それを安全、道路・交通管理、物流管理、情報収集・提供などのアプリケーションで共用するシステムです。
協調ITSでは、車載センサ等により自動車が収集している多様な情報を収集することで、落下物等の道路上の障害を検出して道路管理に活用します。またこれら車両情報と道路管理者が保有するインフラ情報を組み合わせて迅速に情報提供を行うことで、より安全で快適な道路交通の実現を目指しています。
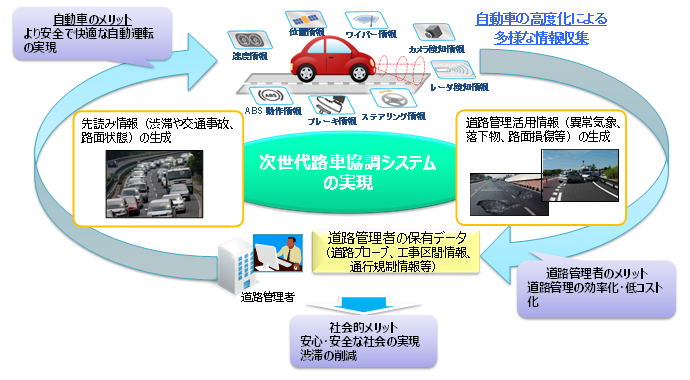 協調ITSのイメージ
協調ITSのイメージ
共同研究では、早期に実現を目指すサービスとして自動運転車向けの「先読み情報提供サービス」や「合流支援サービス」を検討し、サービスイメージやサービス仕様の整理、ETC2.0を用いた路車間通信フォーマット案の検討、国総研試験走路での情報送受信実験等を行いました。
 共同研究の参加者
共同研究の参加者
 共同研究で検討しているサービスの例
共同研究で検討しているサービスの例合流支援サービスは、合流部において自動運転車の自動合流を支援するシステムです。本システムは、高速道路合流部の本線上流側の交通状況を把握し、合流しようとする自動運転車両に情報提供を行い、円滑な合流を支援します。自動運転車両に提供する情報として、本線車両が合流付近に到達すると計算される時刻、その車両の速度や前後車両との車間時間等を想定しています。自動運転車両はこれらの情報を活用して、車載センサでの検知結果と供用して自動運転による合流を行います。
 合流支援サービスのシステムイメージ
合流支援サービスのシステムイメージ
共同研究メンバーである自動車メーカやセンサメーカ、高速道路会社等との協議を重ね、サービスイメージ、センサでの検知項目、自動運転車への情報提供内容、ETC2.0を用いた路車間通信フォーマット案、システム構成案等を検討し、これらをサービス仕様書案として取りまとめました。
| 情報項目 | 内容 |
|---|---|
| 情報生成日時 | 情報を生成した日時 |
| 合流支援システムID | 合流支援システム導入箇所毎に振る番号 |
| 準拠している合流支援システムの仕様書の番号 | 仕様書番号 |
| システム状態 | 各センサ、システムの状態(正常/異常) |
| 情報提供範囲 | 情報提供の対象となる本線の車線 |
| 交通状況概況 |
本線上流部:交通量、平均車速、平均車間時間 本線合流部:平均車速、交通状況 連結路合流部:交通量、通過時刻 本線下流部:交通状況 等 |
| 気象状況 | 天候、降水・降雪量 |
| 基本情報(合流部) | 合流方向、加速車線の長さ・車線数、情報提供位置~加速車線起点までの距離 等 |
| 基本情報(本線部) | 各センサ設置位置~合流部起点までの距離 |
| 到達計算時刻情報 | 対象車両台数、合流部到達時刻(計算値)、車長、速度、前方車両との車間時間 等 |
今後、内閣府戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張)と連携した実道検証試験等を行い、サービスの実現性や効果、課題等について取りまとめを行う予定です。
国土交通省では、内閣府戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張)において、高齢化が進行する中山間地域における人流・物流確保のため、「道の駅」等を拠点とした自動運転サービスの社会実装を目指し、これまで全国18箇所で実験を行いました。
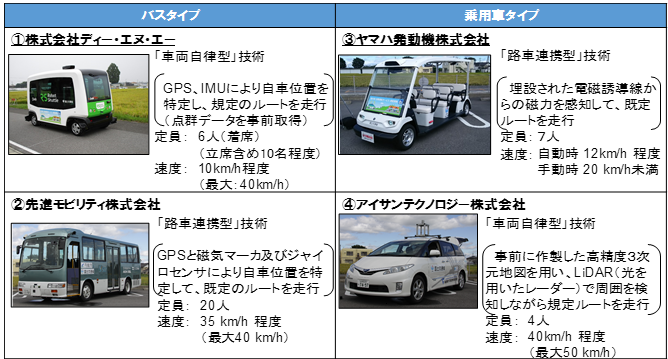 図1.公募により選定された車両
図1.公募により選定された車両
本実証実験において使用した自動運転車両は公募を行い、4車両が選定されました。これらの車両はあらかじめセットされた軌跡通りに走行を行いますが、路上駐車など走路上に障害物がある場合には、センサで検知を行い停止、または人間がハンドル操作を行い、障害物等を回避します。後者の「手動介入等」と呼ぶ操作を削減することが円滑な自動運転の実現に繋がります。国総研では手動介入等が発生している要因を分析し、対策を立案しました。
2017年度に実施した13箇所の実験における手動介入等の発生状況を見ると、手動介入等は混在交通によるもの、センサの機能低下によるもの、道路管理レベルによるものに大別できました。手動介入等で最も多かったのが、図2のように走路上の路上駐車車両の回避によるものでした。 また沿道の民地等からの走路上への植栽の繁茂や、道路脇への除雪により幅員が狭くなり車両センサが障害物として検知して、走行停止や手動運転で回避する場合がありました(図3)。
 図2.走路上の路上駐車
図2.走路上の路上駐車
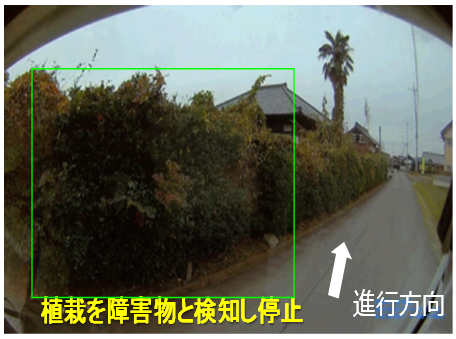 図3.植栽の障害物としての検知
図3.植栽の障害物としての検知
このような手動介入等の状況を踏まえると、円滑な自動運転車の走行のためには、「自己位置特定のインフラ支援」「走行空間の確保、退避場所の設定」「道路管理レベルの向上」等の対策が必要であると考えられます。
走行空間の確保については、路上駐車の抑制や歩行者動線との完全分離等の工夫が必要です。その他、自動運転車の待避スペースを設置して後続の一般車が円滑に追い越しを行うことができるようにすることが必要です。
道路管理レベルの向上については、沿道の民地等の植栽や道路脇の除雪塊等の影響に対して、地元とも協力し自動運転を考慮した道路管理レベルを設定することや、除雪や積雪時を考慮した走行位置を設定することが必要と考えられます。特に除雪については費用がかかることから、沿道の住民との協力が不可欠です。
 図4.走行区間確保の例
図4.走行区間確保の例
国総研による分析と対策の立案をふまえて、自動運転に対応した道路空間に関する検討会の中間とりまとめが作成されました。また本サービスで全国初となる本格導入へ、2019年11月30日より道の駅「かみこあに」(秋田県北秋田郡上小阿仁村)においてスタートしました。今後の社会実装の拡大に向けて技術支援を引き続き行っていきます。