As a government-wide strategy for ITS and autonomous driving, the “Public-Private ITS Initiative/Roadmaps” (approved by the IT Strategic Headquarters) sets forth scenarios and targets related to system commercialization and service launch under the assumption of advanced autonomous driving. The Roadmap includes scenarios through 2025 targeted at realizing advanced autonomous driving, which is divided into three categories: private vehicles, logistics services, and mobility services.
In order to achieve these government targets, the Ministry of Land, Infrastructure, Transport and Tourism (MLIT) established the “Council on Road Spaces Suited to Autonomous Driving (Chair: Professor Hato, the University of Tokyo) ” in July 2019 to hold discussions. The council has since put together recommendations for securing driving spaces suited to autonomous vehicles and for using assistance from self-positioning support infrastructure as two road infrastructure related matters that must be addressed immediately.
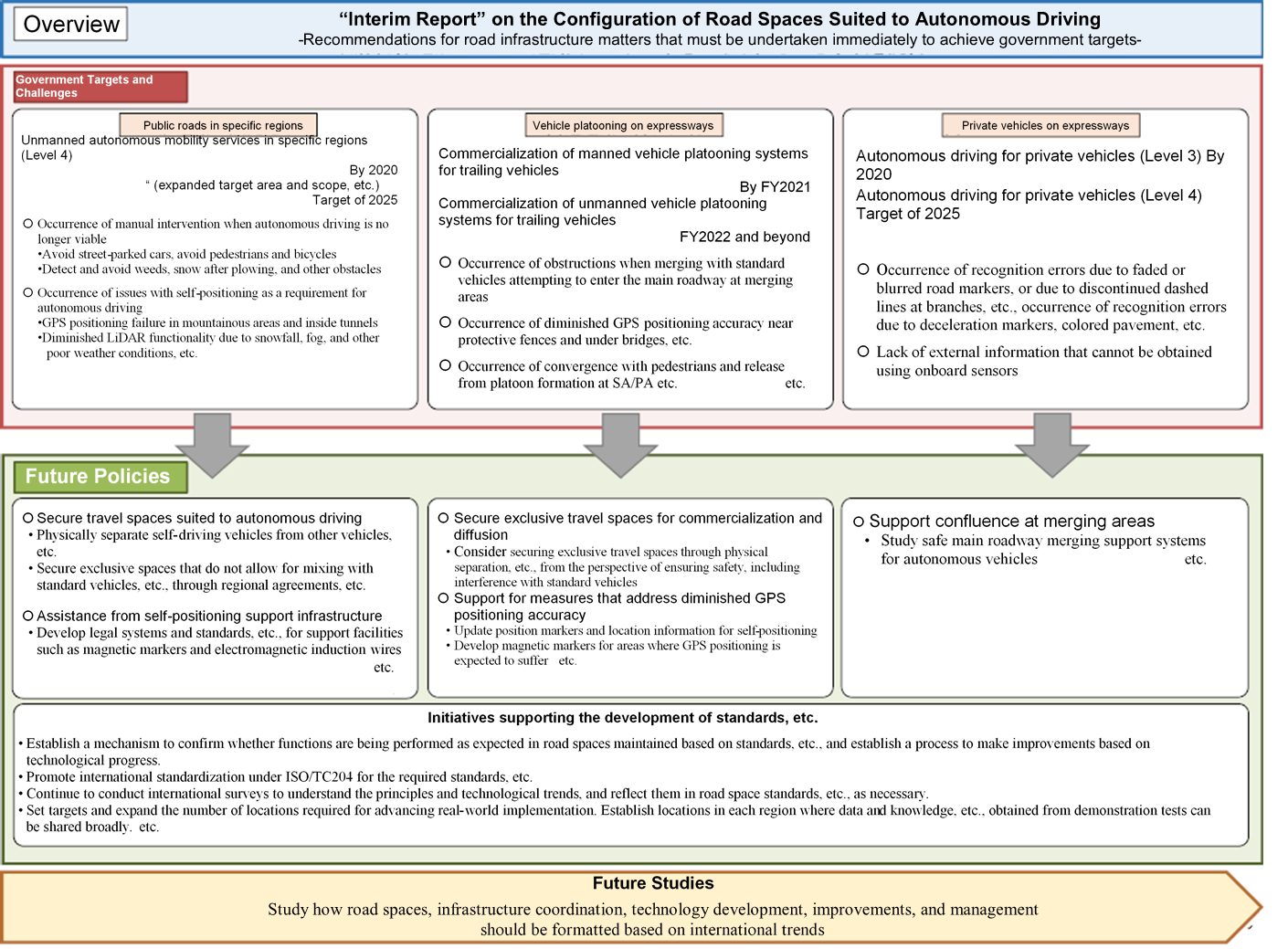 Overview of the “Interim Report” on the Configuration of Road Spaces Suited to Autonomous Driving
Overview of the “Interim Report” on the Configuration of Road Spaces Suited to Autonomous Driving
Autonomous driving is expected to significantly help reduce traffic accidents, alleviate traffic congestion, and secure means of mobility for the elderly. The government’s overall targets are to realize autonomous driving on expressways by around 2020, implement unmanned autonomous mobility services in specific areas by 2020, and realize services in various regions across the country by around 2025
In 2016, MLIT established the “Autonomous Driving Strategic Headquarters,” which has since worked on the measures necessary to realize autonomous driving, including those for infrastructure improvements, technology development and promotion, demonstration tests, and real-world implementation.
In order to secure the flow of people and goods in the aging hilly and mountainous areas of Japan, since FY2017 we have been using the SIP budget to conduct demonstration tests of autonomous mobility services based out of 18 roadside stations and other locations nationwide. We are studying the data obtained during the demonstration test period, questionnaires provided to the users of the autonomous mobility services, and issues identified during service operations as a means of evaluating the technical aspects of autonomous mobility services.
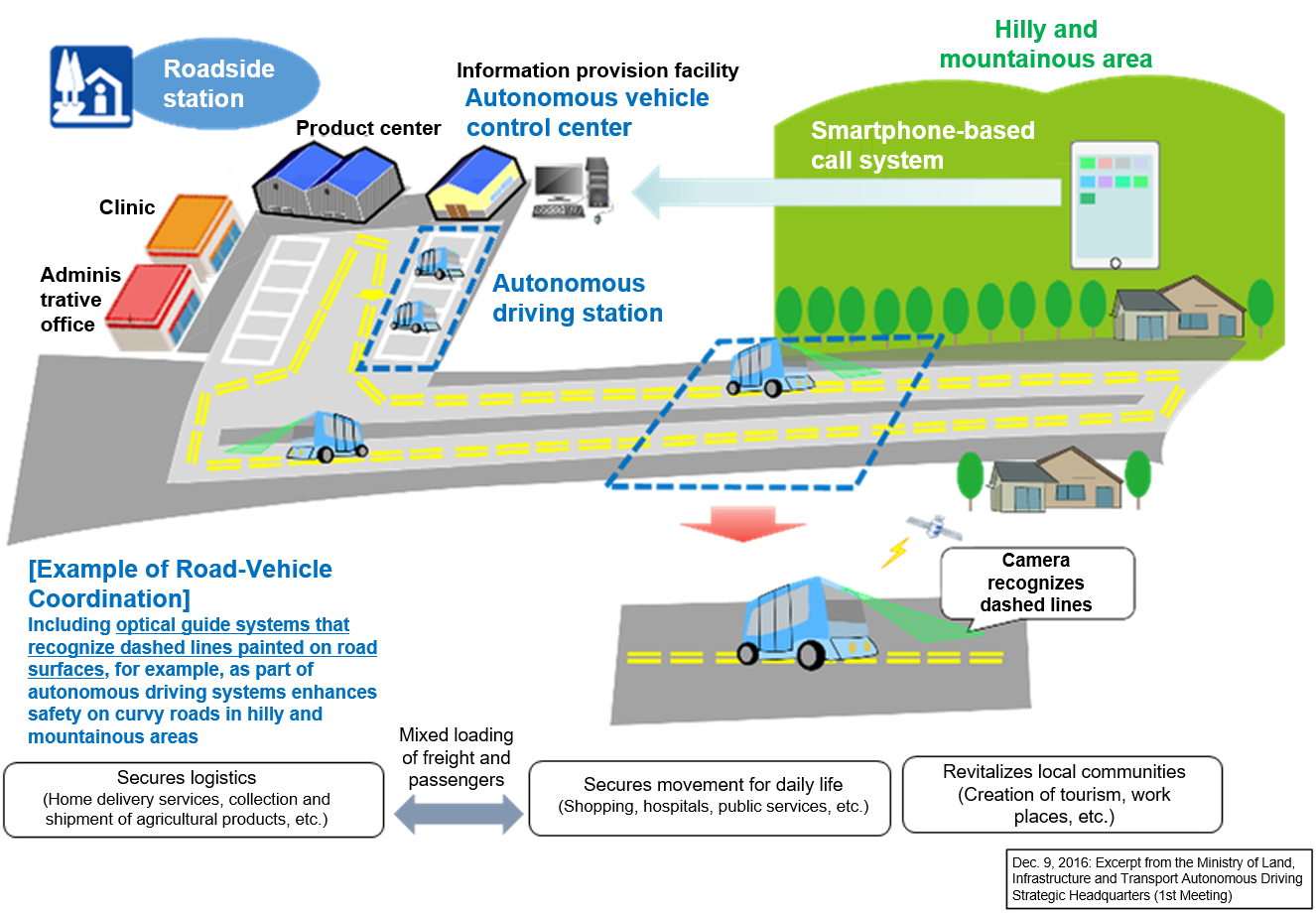 Autonomous Mobility Service Based Out of a Roadside Station in a Hilly and Mountainous Area
Autonomous Mobility Service Based Out of a Roadside Station in a Hilly and Mountainous Area
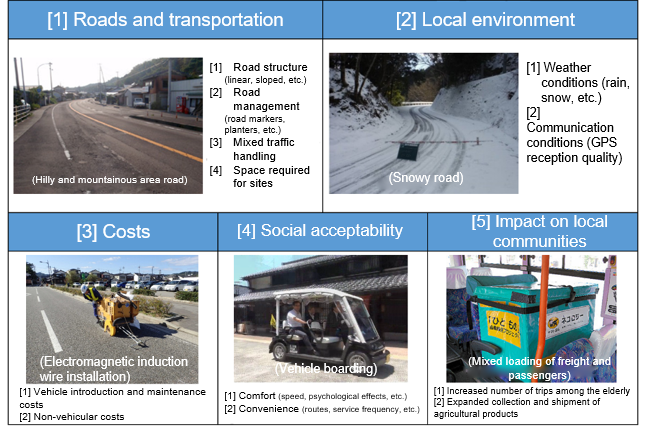 Details Verified During the Demonstration
Details Verified During the Demonstration
 Autonomous Mobility Service at the “Nishikata” Roadside Station
Autonomous Mobility Service at the “Nishikata” Roadside Station
Since January 2018, we have conducted the “Joint Study on Technology Development for Practical Application of Next-Generation Cooperative ITS (hereafter, “joint study”)” along with 29 participating private companies and others chosen via public offering with the aim of developing technologies for road-vehicle cooperative ITS services.
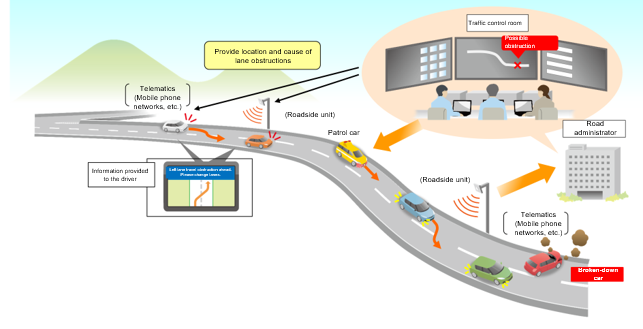
Cooperative ITS is a system in which vehicles, RSUs, and centers exchange information with each other based on a standardized communication protocol and data format used between vehicles and infrastructure. This information is shared among applications for safety, road and traffic management, logistics management, and information collection and provision.
A cooperative ITS aggregates various types of information collected by vehicles using their onboard sensors in order to detect road obstructions, for example fallen objects, and apply this information in road management. By combining these types of vehicle information with the infrastructure information maintained by road administrators and rapidly providing such information, these systems also aim to realize safer, more comfortable road transportation.
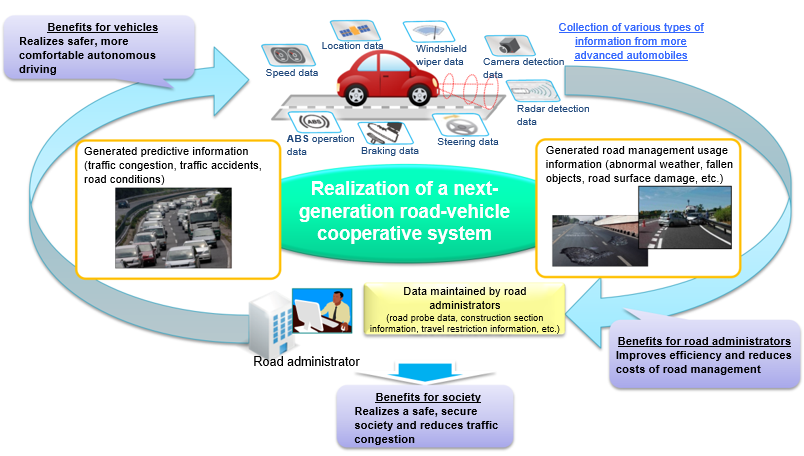 Cooperative ITS Concept
Cooperative ITS Concept
As part of this joint study, we investigated two services to be realized at the earliest possible time for autonomous driving, namely a “Predictive Information Provision Service” and a “Merging Support Service.” We arranged service concepts and service specifications, considered proposals for ETC2.0-based road-vehicle communications formats, and conducted an information transmitting and receiving test at the National Institute for Land and Infrastructure Management (NILIM) test track.
 Joint Study Participants
Joint Study Participants
 Example of a Service Investigated by the Joint Study
Example of a Service Investigated by the Joint StudyThe merging support service is a system that assists the automated merging of autonomous vehicles at merging areas. This system assists seamless merging by monitoring traffic conditions along the main roadway upstream from expressway merging areas and by providing this information to autonomous vehicles attempting to merge. Information to be provided to autonomous vehicles is assumed to include the calculated time until vehicles on the main roadway arrive at the merging area, the speed of these vehicles, and the time between the leading and trailing vehicles. Autonomous vehicles will use this information and combine it with the detection results from onboard sensors to achieve automated merging.
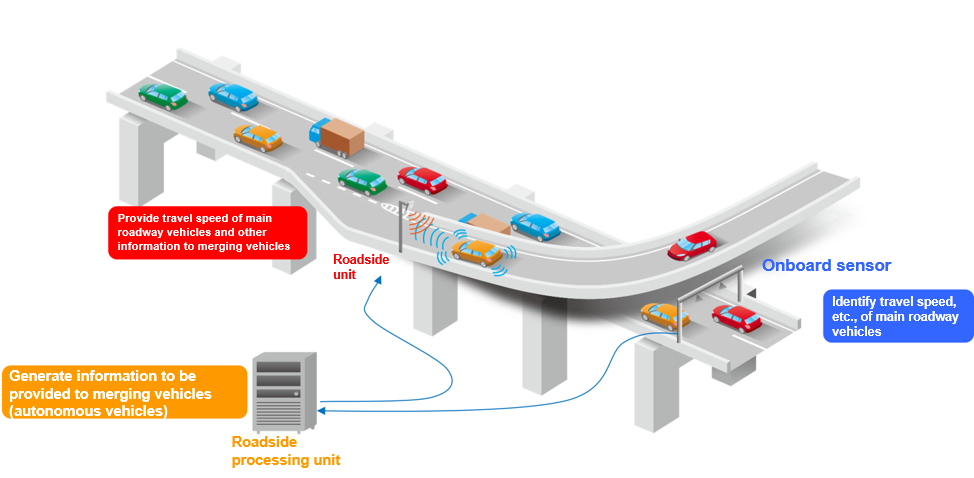 Merging Support Service System Concept
Merging Support Service System Concept
Through a series of discussions with automobile manufacturers, sensor manufacturers, expressway companies, and other members of the joint study, we investigated service concepts, sensor detection items, details of information to be provided to autonomous vehicles, ETC2.0-based road-vehicle communications format proposals, and system configuration proposals, and compiled them as a service specification proposal.
| Information item | Details |
|---|---|
| Information creation time and date | Time and date the information was created |
| Merging support system ID | Number assigned to each merging support system installation site |
| Specifications document number for compliant merging support systems | Specifications document number |
| System condition | Condition of each sensor, system (normal/abnormal) |
| Information provision scope | Main roadway lane for which information is to be provided |
| Traffic condition overview |
Main roadway upstream: traffic volume, average vehicle speed, average time between vehicles Main roadway merging area: average vehicle speed, traffic conditions Connecting roadway merging area: traffic volume, passage time Main roadway downstream: traffic conditions, etc. |
| Weather conditions | Weather, rainfall, snowfall |
| Basic information (merging area) | Merging direction, length and number of acceleration lanes, distance from the information provision location to the start of the acceleration lane, etc. |
| Basic information (main roadway) | Distance between each sensor installation site and the start of the merging area |
| Calculated arrival time information | Number of applicable vehicles, arrival time at merging area (calculated), vehicle length, speed, time between leading vehicle, etc. |
In the future, we plan to conduct real-world road demonstration tests in cooperation with the Cabinet Office Cross-ministerial Strategic Innovation Promotion Program (SIP) Phase 2: Automated Driving for Universal Services, and to compile the feasibility and results of, as well as issues with, this service.
As part of the Cabinet Office Cross-ministerial Strategic Innovation Promotion Program (SIP) Phase 2: Automated Driving for Universal Services, MLIT conducted tests at 18 locations nationwide with the aim of real-world implementation of autonomous mobility services based out of roadside stations and such. These services are intended to secure the flow of people and goods in the aging hilly and mountainous areas of Japan.
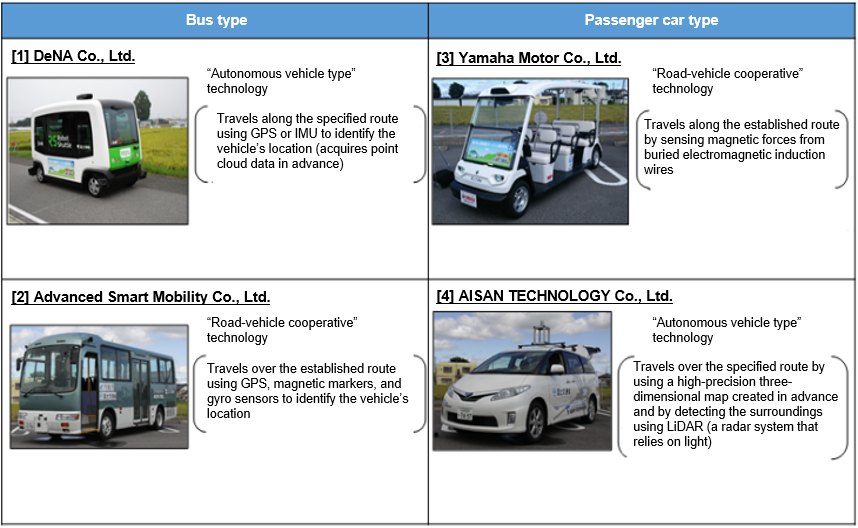 Figure 1 Vehicles Selected Via Public Offering
Figure 1 Vehicles Selected Via Public Offering
Four autonomous vehicles were selected via public offering for use in these demonstration tests. Although these vehicles only travel over pre-set routes, they will stop if their sensors detect any street-parked vehicles and other obstacles along the path of travel, or a human will operate the steering wheel to avoid obstacles. Reducing the latter type of operation, referred to as “manual intervention,” will help realize seamless autonomous driving. NILIM analyzed the causes of manual interventions and proposed countermeasures.
The occurrence of manual interventions during the tests conducted at 13 locations during FY2017 can be roughly divided into three categories: manual intervention due to mixed traffic, diminished sensor functionality, and road management levels. The most common cause of manual intervention was to avoid street-parked vehicles along the path of travel, as shown in Figure 2.
In some cases, the road was narrower than expected due to overgrowth of plantings onto the path of travel from private land along the road and snow plowed onto the sides of the road. Vehicle sensors detected these as obstacles and stopped the vehicle, or the vehicle was manually operated to avoid these (Figure 3).
 Figure 2 Street-parked Vehicle Along the Path of Travel
Figure 2 Street-parked Vehicle Along the Path of Travel
 Figure 3 Plantings Detected as Obstacles
Figure 3 Plantings Detected as Obstacles
In light of these manual intervention situations, potential measures required to achieve seamless autonomous vehicle travel include “self-locating support infrastructure assistance,” “securing travel spaces and establishing refuge areas,” and “raising road management levels.”
Securing travel spaces requires efforts such as controlling on-street parking and completely separating vehicle and pedestrian traffic. In addition, autonomous vehicle refuge spaces are required to enable standard trailing vehicles to smoothly pass.
Raising the level of road management requires setting road management levels that consider autonomous driving in cooperation with local communities and setting travel spaces that consider snow plowing and snow accumulation. These settings are targeted at managing the effects of plantings on private land along the route and snow banks along the sides of roads. In particular, cooperation with residents along the roads is essential given that snow plowing is expensive.
 Figure 4 Example of Securing Travel Spaces
Figure 4 Example of Securing Travel Spaces
The study group prepared an interim report on road spaces suited to autonomous driving based on the analyses and countermeasures proposed by NILIM. On November 30, 2019, we began full-scale introduction of this service, the first of its kind in Japan, at the “Kamikoani” roadside station (Kamikoani-mura, Kitaakita-gun, Akita prefecture). We will continue to provide technical support for the expansion of real-world implementation in the future.